publications
Published research in robotics and machine learning.
2026
- Science Robotics
 Energy efficiency and neural control of continuous versus intermittent swimming in a fishlike robotXiangxiao Liu, François A. Longchamp, Luca Zunino, and 9 more authorsScience Robotics, 2026
Energy efficiency and neural control of continuous versus intermittent swimming in a fishlike robotXiangxiao Liu, François A. Longchamp, Luca Zunino, and 9 more authorsScience Robotics, 2026Many aquatic animals, including larval zebrafish, exhibit intermittent locomotion, moving via discrete swimming bouts followed by passive glides rather than continuous movement. However, fundamental questions remain unresolved: What neural mechanisms drive this behavior, and what functional benefits does this behavior offer? Specifically, is intermittent swimming more energy efficient than continuous swimming, and, if so, by what mechanism? Live-animal experiments pose technical challenges, because observing or manipulating internal physiological states in freely swimming animals is difficult. Hence, we developed ZBot, a bioinspired robot that replicates the morphological features of larval zebrafish. Embedding a network model inspired by neural circuits and kinematic recordings of larval zebrafish, ZBot reproduces diverse swimming gaits of larval zebrafish bout-and-glide locomotion. By testing ZBot swimming in both turbulent and viscous flow regimes, we confirm that viscous flow markedly reduces traveled distance but minimally affects turning angles. We further tested ZBot in these regimes to analyze how key parameters (tail-beating frequency and amplitude) influence velocity and power use. Our results show that intermittent swimming lowers the energetic cost of transport across most achievable velocities in both flow regimes. Although prior work linked this efficiency to fluid dynamics, like reduced glide drag, we identify an extra mechanism: better actuator efficiency. Mechanistically, this benefit arises because intermittent locomotion shifts the robot’s actuators to higher inherent efficiency. This work introduces a fishlike robot capable of biomimetic intermittent swimming—with demonstrated energy advantages at relevant speeds—and provides general insights into the factors shaping locomotor behavior and efficiency in aquatic animals. A robotic fish enables investigation of continuous versus intermittent bout-and-glide swimming.
2025
- Science Robotics
 Artificial embodied circuits uncover neural architectures of vertebrate visuomotor behaviorsXiangxiao Liu, Matthew D Loring, Luca Zunino, and 5 more authorsScience Robotics, 2025
Artificial embodied circuits uncover neural architectures of vertebrate visuomotor behaviorsXiangxiao Liu, Matthew D Loring, Luca Zunino, and 5 more authorsScience Robotics, 2025Brains evolve within specific sensory and physical environments, yet neuroscience has traditionally focused on studying neural circuits in isolation. Understanding of their function requires integrative brain-body testing in realistic contexts. To investigate the neural and biomechanical mechanisms of sensorimotor transformations, we constructed realistic neuromechanical simulations (simZFish) of the zebrafish optomotor response, a visual stabilization behavior. By computationally reproducing the body mechanics, physical body-water interactions, hydrodynamics, visual environments, and experimentally derived neural network architectures, we closely replicated the behavior of real larval zebrafish. Through systematic manipulation of physiological and circuit connectivity features, impossible in biological experiments, we demonstrate how embodiment shapes neural activity, circuit architecture, and behavior. Changing lens properties and retinal connectivity revealed why the lower posterior visual field drives optimal optomotor responses in the simZFish, explaining receptive field properties observed in real zebrafish. When challenged with novel visual stimuli, the simZFish predicted previously unknown neuronal response types, which we identified via two-photon calcium imaging in the live brains of real zebrafish and incorporated to update the simZFish neural network. In virtual rivers, the simZFish performed rheotaxis autonomously by using current-induced optic flow patterns as navigational cues, compensating for the simulated water flow. Last, experiments with a physical robot (ZBot) validated the role of embodied sensorimotor circuits in maintaining position in a real river with complex fluid dynamics and visual environments. By iterating between simulations, behavioral observations, neural imaging, and robotic testing, we demonstrate the power of integrative approaches to investigating sensorimotor processing, providing insights into embodied neural circuit functions.
2024
- EDM 2024
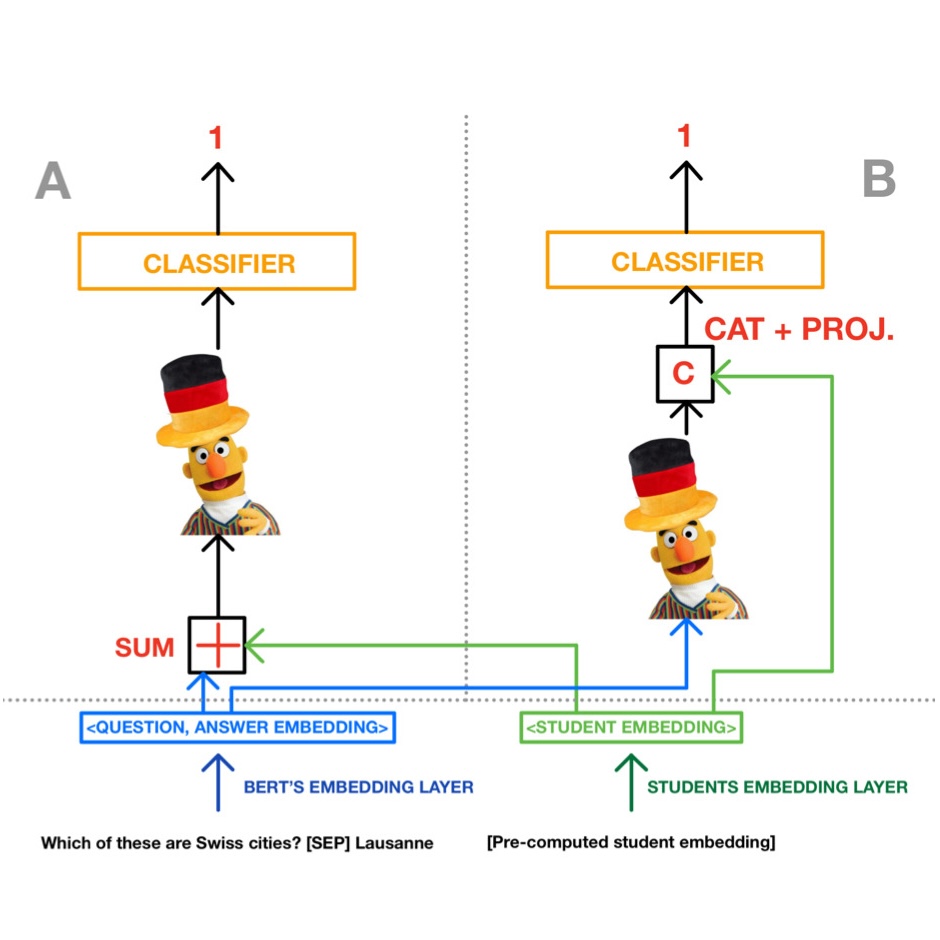 Student Answer Forecasting: Transformer-Driven Answer Choice Prediction for Language LearningElena Grazia Gado, Tommaso Martorella, Luca Zunino, and 4 more authorsIn Proceedings of the 17th International Conference on Educational Data Mining, 2024
Student Answer Forecasting: Transformer-Driven Answer Choice Prediction for Language LearningElena Grazia Gado, Tommaso Martorella, Luca Zunino, and 4 more authorsIn Proceedings of the 17th International Conference on Educational Data Mining, 2024Intelligent Tutoring Systems (ITS) enhance personalized learning by predicting student answers to provide immediate and customized instruction. However, recent research has primarily focused on the correctness of the answer rather than the student’s performance on specific answer choices, limiting insights into students’ thought processes and potential misconceptions. To address this gap, we present MCQStudentBert, an answer forecasting model that leverages the capabilities of Large Language Models (LLMs) to integrate contextual understanding of students’ answering history along with the text of the questions and answers. By predicting the specific answer choices students are likely to make, practitioners can easily extend the model to new answer choices or remove answer choices for the same multiple-choice question (MCQ) without retraining the model. In particular, we compare MLP, LSTM, BERT, and Mistral 7B architectures to generate embeddings from students’ past interactions, which are then incorporated into a finetuned BERT’s answer-forecasting mechanism. We apply our pipeline to a dataset of language learning MCQ, gathered from an ITS with over 10,000 students to explore the predictive accuracy of MCQStudentBert, which incorporates student interaction patterns, in comparison to correct answer prediction and traditional mastery-learning feature-based approaches. This work opens the door to more personalized content, modularization, and granular support.